



Positionneur horizontal à trois axes / Positionneur de robot de soudage
Paramètres techniques
| Positionneur servo triaxial à retournement vertical | Positionneur servo triaxial rotatif horizontal | ||||||
| Numéro de série | PROJETS | Paramètre | Paramètre | REMARQUES | Paramètre | Paramètre | REMARQUES |
| 1 | Charge nominale | 500 kg | 1000 kg | Dans un rayon de 400 mm autour du deuxième axe | 500 kg | 1000 kg | Dans un rayon R400mm/R500mm autour du deuxième axe |
| 2 | Rayon de giration standard de la broche | R1200mm | R1500mm | R1200mm | R1800mm | ||
| 3 | Rayon de giration standard de l'arbre intermédiaire | R400 mm | R500 mm | R400 mm | R500 mm | ||
| 4 | angle de basculement du premier axe | ±180° | ±180° | ±180° | ±180° | ||
| 5 | angle de rotation du deuxième axe | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Vitesse de redressement nominale du premier axe | 50°/S | 24°/S | 50°/S | 24°/S | ||
| 7 | Vitesse de rotation nominale du deuxième axe | 70°/S | 70°/S | 70°/S | 70°/S | ||
| 8 | Précision de positionnement répétée | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Dimensions limites du cadre de déplacement (longueur×largeur×hauteur) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Dimensions globales du sélecteur de position (longueur×largeur×hauteur) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Hauteur centrale de la rotation du premier axe | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Conditions d'alimentation électrique | Triphasé 200 V ± 10 % 50 Hz | Triphasé 200 V ± 10 % 50 Hz | Triphasé 200 V ± 10 % 50 Hz | Triphasé 200 V ± 10 % 50 Hz | Avec transformateur d'isolement | |
| 13 | classe d'isolation | H | H | H | H | ||
| 14 | Poids net de l'équipement | Environ 1800 kg | Environ 3000 kg | Environ 2000 kg | Environ 2000 kg | ||
Positionneur servo triaxial rotatif horizontal

Positionneur servo triaxial à retournement vertical
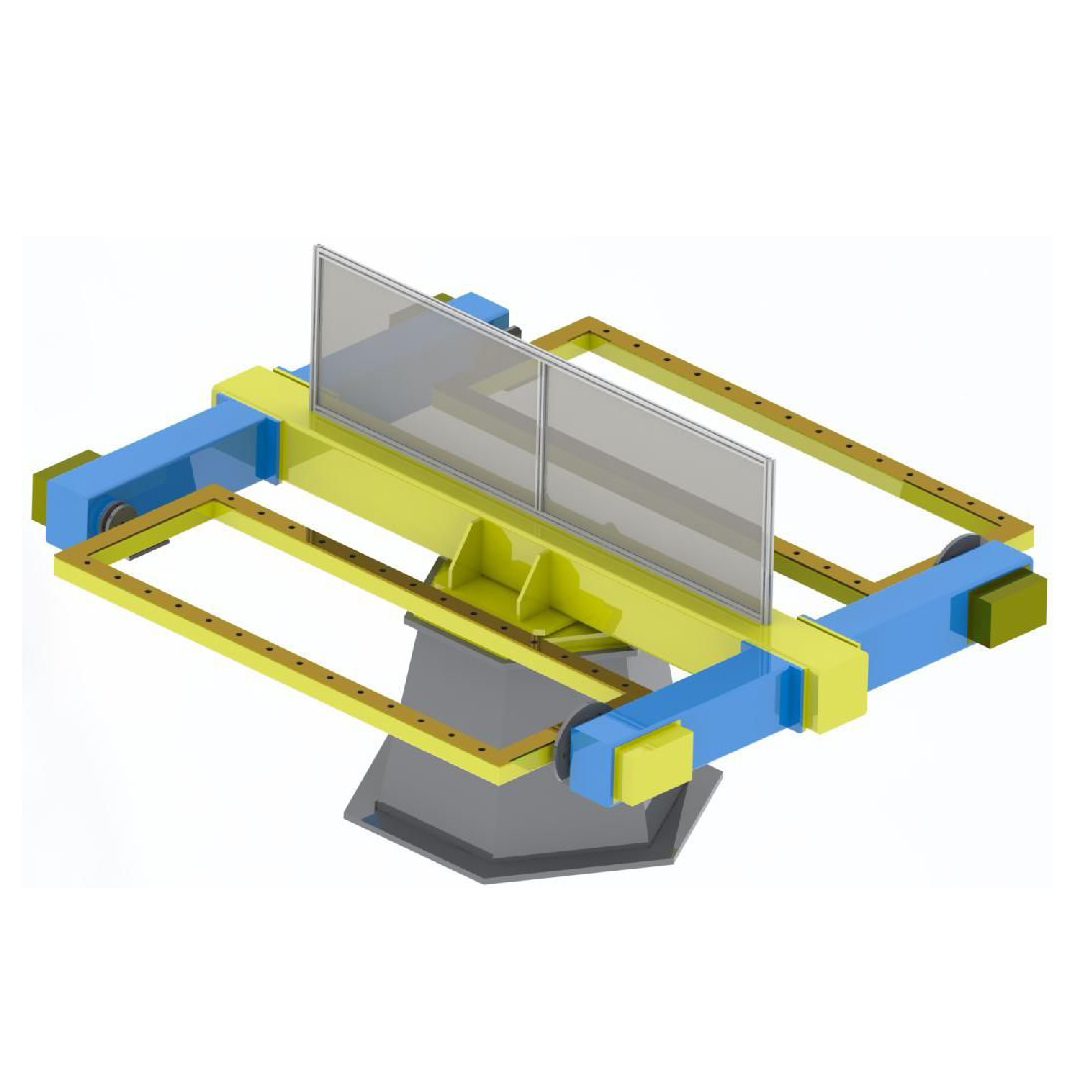
Structure Introduction
Le servopositionneur vertical triaxial à retournement est principalement composé d'un châssis monobloc soudé, d'un châssis de déplacement de retournement, d'un servomoteur à courant alternatif et d'un réducteur de précision RV, d'un support rotatif, d'un mécanisme conducteur, d'un écran de protection et d'un système de commande électrique.
Le châssis monobloc soudé est réalisé avec des profilés de haute qualité. Après recuit et traitement de relaxation des contraintes, il est usiné avec précision afin de garantir une grande exactitude d'usinage et un positionnement précis aux points critiques. La surface est recouverte d'une peinture antirouille à l'aspect esthétique et élégant, dont la couleur peut être personnalisée selon les souhaits du client.
Le châssis de basculement sera soudé avec de l'acier profilé de haute qualité et usiné avec précision. Sa surface sera percée de trous taraudés standard pour le montage des outils de positionnement, puis peinte et traitée contre la corrosion par noircissement.
Un servomoteur à courant alternatif avec réducteur RV est sélectionné comme mécanisme de puissance, ce qui permet d'assurer la stabilité de la rotation, la précision du positionnement et
Grande durabilité et faible taux de panne. Le mécanisme conducteur est en laiton, offrant une excellente conductivité. La base conductrice est dotée d'une isolation intégrale, protégeant efficacement le servomoteur, le robot et le générateur de soudage.
Le système de commande électrique utilise un automate programmable Omron (Japon) pour piloter le positionneur, garantissant ainsi une grande stabilité et un faible taux de panne. Les composants électriques sont issus de marques renommées, tant nationales qu'internationales, assurant qualité et fiabilité d'utilisation.
L'écran anti-lumière est assemblé avec un profilé en aluminium et une plaque en aluminium et plastique pour protéger contre la lumière d'arc générée lors du soudage et du découpage.








