



Robot d'emboutissage/empilage SDCX RMD-300/200/160/120/35/08/110/20/50
Paramètres techniques
| Numéro de modèle | Degré de liberté | Mode de conduite | Charge utile (KG) | Précision de positionnement répétée (mm) | Amplitude de mouvement (°) | Vitesse maximale (°/s) | Inertie de charge admissible du poignet (kg·m2) | Rythme circulaire (cycle/heure) | Rayon de déplacement (mm) | Poids local (kg) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | servomoteur AC | 300 | ±0,5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | servomoteur AC | 200 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | servomoteur AC | 160 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | servomoteur AC | 120 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | servomoteur AC | 50 | ±0,2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 1700② | 2040 | 660 |
| SDCX-RMD20 | 4 | servomoteur AC | 20 | ±0,08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0,51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | servomoteur AC | 8 | ±0,08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367,5 | 0,25 | 1800① | 1433 | 180 |
Remarques :
① La piste d'essai mesure 150 mm de haut et 1000 mm de large, et le temps de cycle réel est affecté par les conditions de travail réelles ;
② La piste d'essai mesure 200 mm de haut et 1000 mm de large, et le temps de cycle réel est affecté par les conditions de travail réelles ;
③ La piste d'essai mesure 400 mm de haut et 2000 mm de large, et le temps de cycle réel est affecté par les conditions de travail réelles ;
Éviter tout contact avec les gaz et liquides inflammables, explosifs et corrosifs ; éviter les projections d’eau, d’huile et de poussière ; tenir à l’écart des sources de perturbations électriques (plasma).
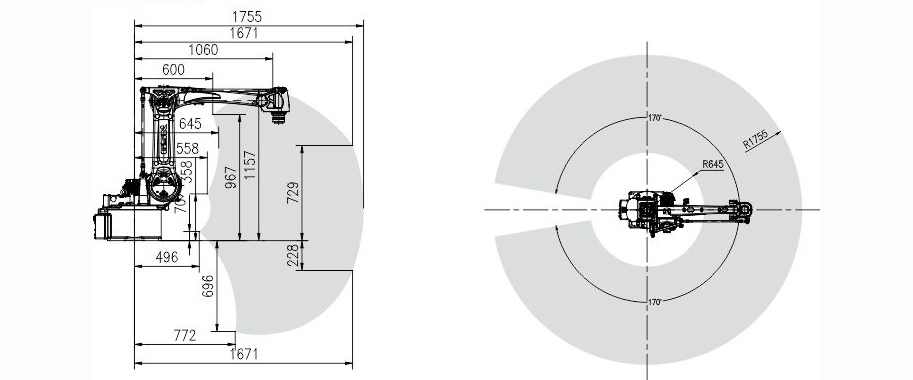
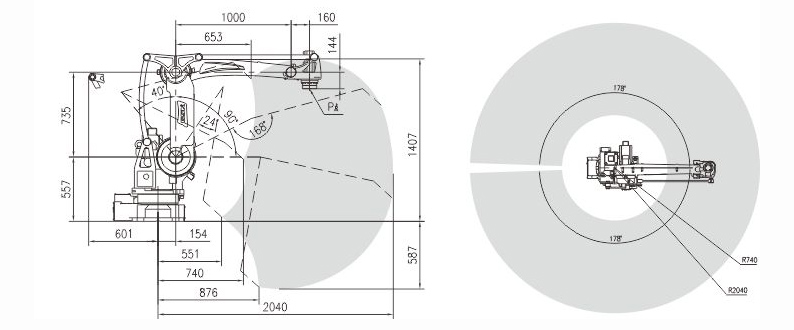
Amplitude des mouvements
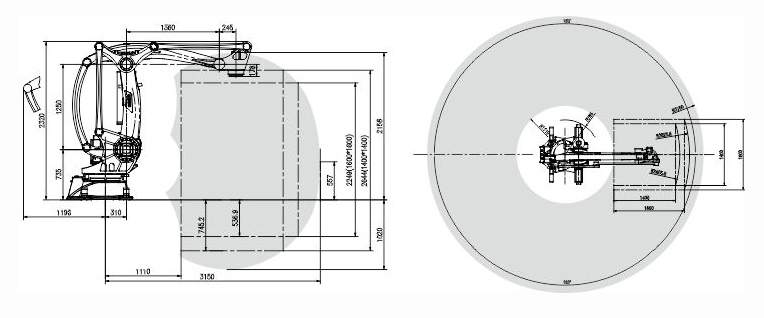
Graphique de la plage de mouvement pour SDCX-RMD300/200/160/120
Graphique de la plage de mouvement pour SDCX-RMD20
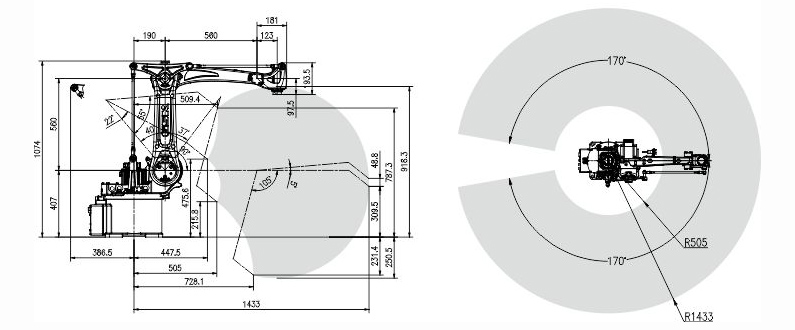
Graphique de la plage de mouvement pour SDCX-RMD08
Graphique de la plage de mouvement pour SDCX-RMD50
Affichage de l'application du produit
Solutions
Schéma technique du projet de manutention des bobines d'acier












